by Gunter Logemann
2007:
22.10.2007 Test Flight of the New Frame
It's up and running... the test flight was successful. Even
the parameter need some modifications the first flight was without
any problems. The landing gear was borrowed from my tuned ECO 8.

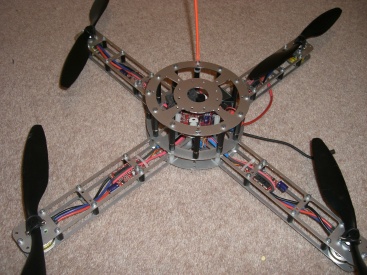
21.10.2007 New Mikrocopter Frame
The new modular Frame is ready and will be equipped with
the preassembled MikroKopter Flight Control and Brushless
Controllers. The new Mikrokopter will be powered by four ROXXY
2427-34 to allow a heavier payload to carry the navigation and data
communication board.
22.09.2007 Microsofts Robotic Studio Service for
Mikrokopter
Finally I was able to create a service that shows the
debugging information of the Flight Control. The Service contains
everything that is required to communicate with a Mikrokopter.
15.08.2007 Mikrokopter Down Link and Distance Sensors
The data communication between the Mikrocopter and the
basestation is now working. In Addition i made the first test with
the distance sensors. I've taken some Videos of both
06.08.2007 Flying Robot Platform shown in public...
Today was the day to present the Mikrokopter on the the
field in the Wicklow Mountains. Well, the lads where impressed about
the status of the project.
The test flight took place between two rain showers and in strong
winds (about 40 km/h) (look at the wind sack). I was able to fly 4
battery packs empty ( about 40min flight time) without any problems.

So far so good - it's flying, like my other helicopters :-). Now it is time to turn it into a real robot. The next step is to add the video and data down link.
27.7.2007. Test flight
The Quadrocopter frame is completed and equipped with the
Mikrokopter hardware. The brushless engines (E-Flight ParkFly
370/1093KV) are used with the Mikrokopter brushless controller. The
test flight took place in the kitchen due to the bad weather in
Ireland :-).